Каждый процесс имеет уникальный идентификатор PID, позволяющий ядру системы различать процессы. Когда создается новый процесс, ядро присваивает ему следующий свободный (т. е. не ассоциированный ни с каким процессом) идентификатор. Присвоение идентификаторов происходит по возрастающий, т.е. идентификатор нового процесса больше, чем идентификатор процесса, созданного перед ним. Если идентификатор достиг максимального значения, следующий процесс получит минимальный свободный PID и цикл повторяется. Когда процесс завершает свою работу, ядро освобождает занятый им идентификатор.
Что такое Pid в Linux?
PID (т. Е. Идентификационный номер процесса) — это идентификационный номер, который автоматически присваивается каждому процессу при его создании в Unix-подобной операционной системе.
Процесс — это исполняемый (т. Е. Запущенный) экземпляр программы.
Каждому процессу гарантируется уникальный PID, который всегда является неотрицательным целым числом.
Как мне найти PID процесса в Linux?
Процедура поиска процесса по имени в Linux
О том что такое PID и рейты, как настроить ПИДы? . Настройка ПИДов на FPV дроне
- Откройте приложение терминала.
- Введите команду pidof, как показано ниже, чтобы найти PID для процесса firefox: pidof firefox.
- Или используйте команду ps вместе с командой grep следующим образом: ps aux | grep -i firefox.
- Чтобы найти или сигнализировать о процессах на основе использования имени:
Что такое PID в операционной системе?
В вычислениях идентификатор процесса (обычно называемый идентификатором процесса или PID) — это число, используемое большинством ядер операционных систем, таких как ядра UNIX, macOS и Microsoft Windows, для однозначной идентификации активного процесса.
Как вы проверяете PID?
Как получить PID с помощью диспетчера задач
- Нажмите Ctrl + Shift + Esc на клавиатуре.
- Перейдите на вкладку «Процессы».
- Щелкните правой кнопкой мыши заголовок таблицы и выберите PID в контекстном меню.
Как убить PID?
Вот что вы делаете:
- Используйте команду ps, чтобы получить идентификатор процесса (PID) процесса, который вы хотите завершить.
- Выполните команду уничтожения для этого PID.
- Если процесс отказывается завершиться (т. Е. Игнорирует сигнал), отправляйте все более жесткие сигналы, пока он не завершится.
Как убить процесс в Linux?
Очень легко убить процессы с помощью команды top. Сначала найдите процесс, который вы хотите убить, и запишите PID. Затем нажмите k во время работы top (это чувствительно к регистру). Вам будет предложено ввести PID процесса, который вы хотите убить.
Как я могу увидеть, какие службы работают в Linux?
Проверьте запущенные службы в Linux
- Проверить статус услуги. Сервис может иметь любой из следующих статусов:
- Запустите службу. Если служба не запущена, вы можете использовать команду службы для ее запуска.
- Используйте netstat, чтобы найти конфликты портов.
- Проверить статус xinetd.
- Проверить журналы.
- Следующие шаги.
Что такое номер PID?
Сокращенно от идентификатора продукта или идентификатора продукта, PID — это уникальный номер, который помогает идентифицировать аппаратный продукт или зарегистрированный программный продукт. Сокращенно от идентификатора процесса, PID — это уникальный номер, который идентифицирует каждый из запущенных процессов в операционной системе, такой как Linux, Unix, macOS и Microsoft Windows.
О PID регуляторе простым языком (что такое ПИДы)
Что такое состояние процесса в операционной системе?
Готовый. Процесс ожидает назначения процессору. Готовые процессы ждут, пока операционная система выделит им процессор, чтобы они могли работать. Процесс может перейти в это состояние после состояния Start или во время его выполнения, но прерванный планировщиком, чтобы назначить CPU какому-либо другому процессу.
Что такое программа и процесс?
Программа и процесс — это взаимосвязанные термины. Основное различие между программой и процессом состоит в том, что программа — это группа инструкций для выполнения определенной задачи, тогда как процесс — это выполняемая программа. В то время как процесс является активным объектом, программа считается пассивной.
В чем разница между Су и Судо?
Ключевые различия между sudo и su. Команда su обозначает суперпользователя или пользователя root. Сравнивая оба, sudo позволяет использовать пароль учетной записи пользователя для запуска системной команды. С другой стороны, su заставляет пользователя делиться паролями root с другими пользователями.
Как убить процесс в Unix?
Примеры команды kill, чтобы убить процесс в Linux
- Шаг 1 — Узнайте PID (идентификатор процесса) lighttpd. Используйте команду ps или pidof, чтобы узнать PID для любой программы.
- Шаг 2 — завершите процесс с помощью PID. PID # 3486 назначен процессу lighttpd.
Как убить весь процесс в Linux?
- nohup позволяет запускать программу таким образом, чтобы она игнорировала сигналы зависания.
- ps отображает список текущих процессов и их свойств.
- kill используется для отправки сигналов завершения процессам.
- pgrep ищет и завершает системные процессы.
- pidof отображает идентификатор процесса (PID) задачи.
- killall убить процесс по имени.
Что такое Kill 9 в Linux?
9 ответов. Как правило, вы должны использовать kill (сокращение от kill -s TERM или в большинстве систем kill -15) перед kill -9 (kill -s KILL), чтобы дать целевому процессу возможность очиститься после себя. (Процессы не могут улавливать или игнорировать SIGKILL, но они могут и часто перехватывают SIGTERM.)
Как убить фоновые процессы?
Чтобы убить это задание / процесс, работает либо kill% 1, либо kill 1384. Удалите задания из таблицы активных заданий оболочки. Команда fg переключает задание, выполняющееся в фоновом режиме, на передний план. Команда bg перезапускает приостановленное задание и запускает его в фоновом режиме.
Как убить процесс в Терминале?
Откройте приложение Терминал. Перечислите запущенные процессы. Найдите процесс, который хотите закрыть. Убейте процесс.
- идентификатор процесса (PID)
- затраченное время, потраченное на бег.
- путь к файлу команды или приложения.
Как убить команду в Linux?
Команда kill в Linux (находится в / bin / kill) — это встроенная команда, которая используется для завершения процессов вручную. Команда kill отправляет сигнал процессу, который завершает процесс.
Сигналы можно указать тремя способами:
- По номеру (например, -5)
- С префиксом SIG (например, -SIGkill)
- Без префикса SIG (например, -kill)
Как я могу увидеть запущенные процессы в Linux?
Как управлять процессами из терминала Linux: 10 команд, которые вам нужно знать
- Топ. Команда top — это традиционный способ просмотреть использование ресурсов вашей системы и увидеть процессы, которые занимают больше всего системных ресурсов.
- htop. Команда htop — это улучшенный топ.
- пс.
- пстри.
- убийство.
- схватить.
- pkill и killall.
- Ренис.
Как остановить службу в Linux?
Я помню, что в свое время, чтобы запустить или остановить службу Linux, мне нужно было открыть окно терминала, перейти в /etc/rc.d/ (или /etc/init.d, в зависимости от того, какой дистрибутив я использовал), найдите службу и выполните команду /etc/rc.d/SERVICE start. останавливаться.
Как вы проверяете, что все службы работают в Linux?
Список запущенных служб с помощью служебной команды в CentOS / RHEL 6.x или более ранней версии
- Распечатайте статус любой услуги. Чтобы распечатать статус службы apache (httpd): service httpd status.
- Перечислить все известные службы (настроенные через SysV) chkconfig –list.
- Перечислите службы и их открытые порты. netstat -tulpn.
- Включение / выключение службы. нцысв.
Что работает в Linux?
/ run — это «ранняя пташка», эквивалентная / var / run, в том смысле, что он предназначен для системных демонов, которые запускаются очень рано (например, systemd и udev) для хранения временных файлов времени выполнения, таких как файлы PID и конечные точки сокета связи, в то время как / var / run будет использоваться поздно запускающимися демонами (например, sshd и Apache).
Как мне увидеть фоновые процессы в Linux?
Запустить процесс Unix в фоновом режиме
- Чтобы запустить программу подсчета, которая отобразит идентификационный номер процесса задания, введите: count https://frameboxxindore.com/ru/Linux/%D1%87%D1%82%D0%BE-%D1%82%D0%B0%D0%BA%D0%BE%D0%B5-pid-%D0%B2-Linux.html» target=»_blank»]frameboxxindore.com[/mask_link]
Урок 40. ПИД регулятор. Принцип действия, математическое описание, настройка.
Продолжение разработки проекта контроллера модуля Пельтье, начатой в уроке 36. Узнаем, что такое ПИД регулятор.
Основная задача контроллера холодильника – поддержание в камере заданной температуры. Делать это будет регулятор температуры за счет изменения электрической мощности на модуле Пельтье.
В предыдущем уроке мы разработали регулятор мощности. Связь регуляторов мощности и температуры выглядит так.
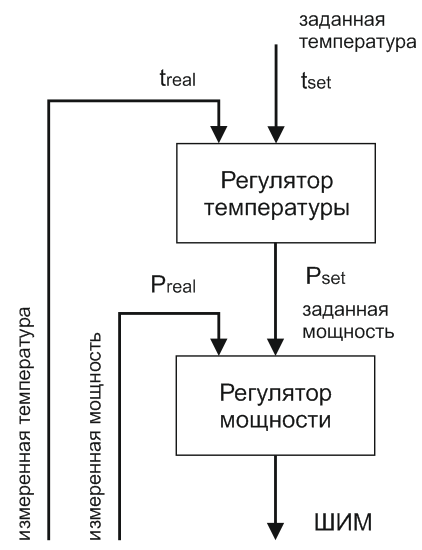
- Регулятор температуры получает измеренную температуру, сравнивает ее с заданной температурой и вычисляет значение заданной мощности для регулятора мощности.
- Регулятор мощности формирует ШИМ, соответствующий заданной мощности.
Регулятор мощности мы построили по интегральному закону регулирования. Для стабилизации температуры будем использовать более сложный алгоритм управления – пропорционально-интегрально-дифференцирующий (ПИД) регулятор.
ПИД регулятор.
В предыдущем уроке я подробно рассказал об интегральном регуляторе. Подчеркнул его достоинства и недостатки.
Регулятор, работающий по такому принципу, обладает высокой точностью. Остальные критерии качества регулирования – быстродействие и устойчивость — у него не на высоте.
Для того чтобы добиться высоких показателей для всех критериев необходимо использовать регулятор, объединяющий в себе разные законы регулирования.
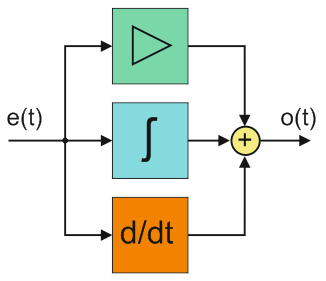
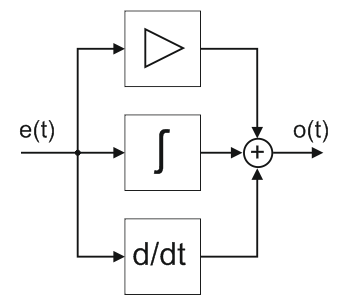
Именно таким устройством является пропорционально-интегрально-дифференцирующий (ПИД) регулятор. Он формирует выходной сигнал, являющийся суммой трех составляющих с разными передаточными характеристиками. Благодаря этому ПИД регулятор обеспечивает высокое качество регулирования и позволяет оптимизировать управление по отдельным критериям.
В формировании выходного сигнала ПИД регулятора участвуют:
- Пропорциональная составляющая – значение пропорционально ошибке рассогласования (разности заданного и реального значений регулируемого параметра).
- Интегрирующая составляющая – интеграл ошибки рассогласования.
- Дифференцирующая составляющая – производная ошибки рассогласования.
Математическая форма записи закона ПИД регулятора имеет вид:
- o(t) – выходной сигнал;
- P – пропорциональная составляющая;
- I – интегрирующая составляющая;
- D – дифференцирующая составляющая;
- Kp, Ki, Kd – коэффициенты пропорционального, интегрирующего, дифференцирующего звеньев;
- e(t) – ошибка рассогласования.
В схематичном виде ПИД регулятор можно представить так.
Структурная схема ПИД регулятора напряжения U выглядит так.
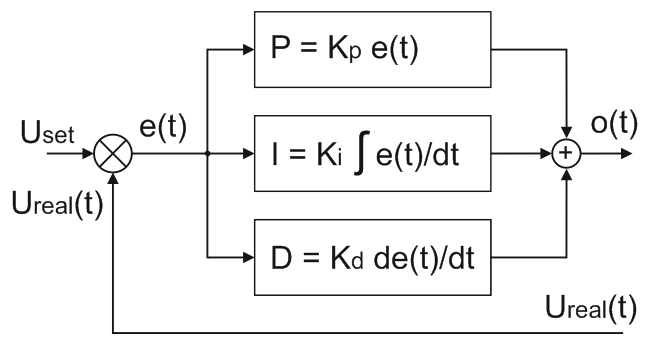
- Измеренное напряжение Ureal(t) вычитается из заданного Uset.
- Полученная ошибка рассогласования e(t) поступает на пропорциональное, интегрирующее и дифференцирующее звенья.
- В результате суммы составляющих получается управляющее воздействие o(t), которое подается на регулирующий элемент.
При программной реализации ПИД регулятора вычисления выходного сигнала происходят через равные промежутки времени. Т.е. регулятор является дискретным по времени. Поэтому, далее я буду употреблять выражения: предыдущее состояние сигнала, предыдущее значение и т.п. Речь идет о состоянии системы в предыдущей точке временной дискретизации.
Составляющие ПИД регулятора.
Еще раз. Выходной сигнал ПИД регулятора это сумма трех составляющих:
- пропорциональной;
- интегрирующей;
- дифференцирующей.
Пропорциональная составляющая.
Не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0.
Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в Kp раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем.
Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента Kp, но это может привести к снижению устойчивости системы и даже к автоколебаниям.
К недостаткам пропорциональных регуляторов следует отнести:
- наличие статической ошибки регулирования;
- невысокая устойчивость при увеличении коэффициента.
Есть весомое преимущество:
- Высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы.
Регуляторы, работающие только по пропорциональному закону, применяют редко.
Главная задача пропорциональной составляющей в ПИД регуляторе – повысить быстродействие.
Интегрирующая составляющая.
Пропорциональна интегралу ошибки рассогласования. С учетом временной дискретности регулятора можно написать так:
- I(t-1) – значение I в предыдущей точке временной дискретизации.
Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента Ki. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей.
К недостаткам интегрального регулятора следует отнести:
- низкое быстродействие;
- посредственная устойчивость.
- Способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления.
На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие).
Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования.
Дифференцирующая составляющая.
Пропорциональна скорости изменения ошибки рассогласования. Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы.
С учетом временной дискретности регулятора дифференцирующую составляющую можно вычислить так:
Она показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора.
Регуляторов, состоящих из единственного дифференцирующего звена, не бывает.
Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости.
Настройка ПИД регулятора.
Качество регулирования ПИД регуляторов в значительной мере зависит от того, насколько оптимально выбраны коэффициенты. Коэффициенты ПИД регулятора определяются на практике в системе с реальным объектом путем подбора. Существуют разные методики настройки. Я расскажу только об общих принципах.
О качестве регулирования судят по переходной характеристике регулятора. Т.е. по графику изменения регулируемого параметра во времени.
К традиционным пунктам последовательности настройки ПИД регулятора я бы добавил, что, прежде всего, надо определиться какие критерии качества регулирования предпочтительнее.
В предыдущем уроке при разработке регулятора мощности нас в первую очередь интересовали точность и устойчивость. А быстродействие мы даже искусственно снизили. Какие-то регуляторы работают в условиях значительных помех и им важнее устойчивость, от других требуется высокое быстродействие даже в ущерб точности. Критерии оптимизации могут быть разными. В общем случае ПИД регуляторы настраивают для обеспечения всех критериев качества регулирования на высоком уровне.
Составляющие ПИД регулятора настраиваются отдельно.
- Отключается интегрирующее и дифференцирующее звенья и выбирается коэффициент пропорционального звена. Если регулятор пропорционально-интегрирующий (отсутствует дифференцирующее звено), то добиваются полного отсутствия колебаний на переходной характеристике. При настройке регулятора на высокое быстродействие колебания могут остаться. Их попытается скомпенсировать дифференцирующее звено.
- Подключается дифференцирующее звено. Его коэффициентом стремятся убрать колебания параметра регулирования. Если не удается, то уменьшают пропорциональный коэффициент.
- За счет интегрирующего звена убирают остаточную ошибку рассогласования.
Настройка ПИД регулятора носит итерационный характер. Т.е. пункты подбора коэффициентов могут многократно повторяться до тех пор, пока не будет достигнут приемлемый результат.
Благодаря высоким характеристикам и универсальности ПИД регуляторы широко применяются в системах автоматизации производства.
В следующем уроке будем разрабатывать ПИД регулятор температуры.
Источник: mypractic.ru