За последние 50 лет было придумано множество разновидностей последовательных интерфейсов: SPI, I2C, I2S, RS-232, USB, Firewire, — мы поговорим о том, что такое UART в целом.
Но для начала надо разобраться в чем разница между последовательными и параллельными интерфейсами. Слово «последовательный» означает, что данные передаются по одному проводу последовательно, бит за битом. А «параллельный» означает, что между устройствами есть шина из нескольких проводов, по которым части сообщения передаются одновременно.
SyamilAshri at English Wikibooks [GFDL (http://www.gnu.org/copyleft/fdl.html) or CC BY-SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0)], from Wikimedia Commons
Преимущества параллельной передачи данных в том, что за один шаг передаётся сразу группа битов. К тому внутри процессора используются параллельная передача, поэтому данные сразу, можно сказать, передаются и принимаются в удобной форме. Но есть и недостатки.
Главный заключается в том, что биты по проводам могут приходить не одновременно и требуются дополнительные ухищрения для получения неискаженных сообщений. Это сильно ограничивает максимальную скорость передачи. (прим. Тут ничего удивительного. В силу физических причин биты по разных проводам не могут приходить со 100% одновременностью.)
Usb/ttl конвертеры. Выбираем лучший. Изготовление прищепки для программирования.
При последовательном способе передачи передаваемые биты должны быть преобразованы в параллельную форму и наоборот (в силу того, что внутри процессора быит передаются параллельно). Это преобразование требует времени. Но зато мы получаем огромное преимущество в виде отсутствия необходимости синхронизировать поступление битов по каждому проводу, что также расширяется скоростные возможности линии передачи.
UART
Universal Asynchronous Receiver/Transmitter или просто UART используется с ранних 1960-х и с тех пор претерпевал постоянные изменения. Несмотря на то, что постоянно производятся попытки уничтожить UART, последовательные протоколы этого типа всё ещё представляют важный способ общения между устройствами встраиваемых систем.
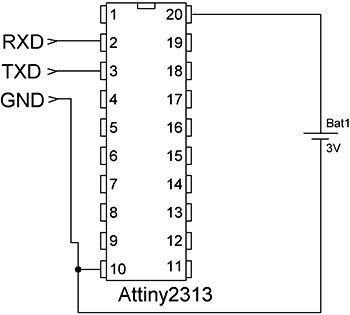
UART представляет собой периферийное устройство в процессоре, с помощью которого осуществляется общение между устройствами по последовательному протоколу на небольшие расстояния. Кстати, UART является основой стандарта RS-232 (тот самый D-образный разъем с 9-ю пинами). В языке «С» вывод printf часто может передаваться напрямую через UART. Вообще порты работающие по UART чаще всего называются просто последовательными портами. В самой простой форме UART представляет собой три провода: земля, передача, приём.
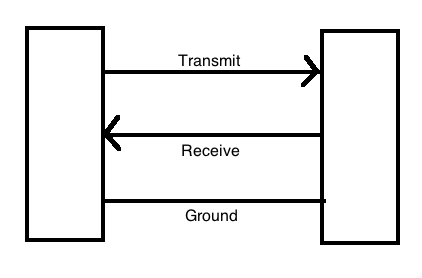
Первая проблема UART в том, что нет возможности определить какое устройство ведущее, а какое ведомое (master/slave), так что непонятно к чему цеплять transmit? Обычно, это определяют за нас. Например, кто-то, кто проектирует печатную плату может назвать этот провод как TX и определить, что устройство должно соединяться так, тогда система будет выглядеть следующим образом:
HDMI 2.1 CAPTURE CARDS — Here’s What You Need to Know!
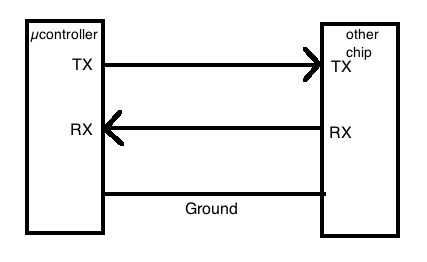
В итоге получается вариант, когда процессор и принимает, и передаёт данные. Другой способ конфигурации выглядит вот так:

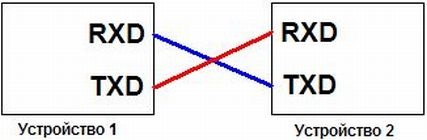
Тогда получается вариант, где процессор всегда передаёт (TX) получателю (RX) и наоборот. Какой вариант правильный? Оказывается это решение принимает за нас производитель чипа и готовой платы/устройства.
Я видел множество примеров использования обоих вариантов настолько часто, что без прочтения даташита невозможно было определить как именно следует производить конфигурацию устройств. Если бы я имел контроль над наименованием, то закрепил второй вариант, когда TX соединено с RX. На практике чаще всего TX, подсоединённый к TX, приводит к сгоранию чипов (тоже верно и для RX-RX), так что это хороший пример того, что надо читать документацию перед тем как соединять чипы по UART, так как существует несколько способов соединения.
Когда отправитель и получатель располагаются на одной плате, тогда уровень напряжения сигнала при передаче соответствует уровню напряжения питания процессора. К примеру, «1» будет передаваться с напряжением 3.3В, а «0», грубо говоря, с 0В. Это неочень полезно тогда, когда требуется передать сигнал более, чем на несколько дюймов (1 дюйм = 2.54 см), так как начинают появляться искажения сигнала и увеличивается падение напряжения. В итоге, чем дальше расстояние, тем количество ошибок передачи растет и в итоге становится невозможно передать сообщение, так как оно поступает до невозможности искаженным.

Для того, чтобы избежать подобной ситуации добавляют дополнительные чипы-буферы, усиливающие сигналы. После этого сигналы могут передаваться уже на метры без существенной потери информации. Однако, напряжения при передаче битов довольно странные: для передачи 1 используются -3В..-15В, а для передачи 0 — от +3В до +15В. Это те самые напряжения, которые используются в RS-232. Кстати, буферы в RS-232 также являются ограничителями тока, так что контакты разъёма можно замыкать между собой и он не выгорит.
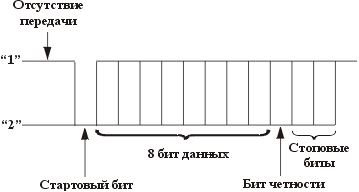
Начало и конец передачи данных

By Rs232_oscilloscope_trace.jpg: Ktnbn derivative work: Samuel Tardieu (Rs232_oscilloscope_trace.jpg) [CC SA 1.0 (http://creativecommons.org/licenses/sa/1.0/)], via Wikimedia Common
UART — это последовательный интерфейс (он посылает и принимает биты последовательно: бит за битом), но при этом он не передаёт информацию для синхронизации. Отправитель и получатель не синхронизированы. Таким образом взаимодействие отправителя и получателя является асинхронным.
Вместо информации о синхронизации в UART используется «стартовый бит» для сигнализации о том, что мы собираемся передать сообщение. После передачи стартового бита передаётся сообщение, а затем передаётся «стоп-бит», указывающий о завершении процесса передачи сообщения. Суммарно получается 10 бит: 1 старт-бит, 8 бит данных, 1 стоп-бит.
Биты передаются с заранее установленной скоростью передачи, которая измеряется в битах в секунду или, иначе, в бодах. Так что 9600 бод эквивалентно 9600 бит/сек. А так как у нас передаётся 10 бит за одно сообщение (старт-бит, данные, стоп-бит), это это значит, что мы можем передать 960 сообщений в секунду.
Так как значение скорости передачи не передаётся вместе с сообщением, то и приёмник и получатель должны заранее установить одинаковое значение скорости передачи/приёма. Конечно, скорости на обеих системах не будут совпадать со 100% точностью (опять же в силу чисто технических причин, так как таймеры на разных системах имеют погрешности), но UART допускает до 5% рассинхронизации таймеров. В этих пределах мы будем получать и принимать верные сообщения.
USARTS
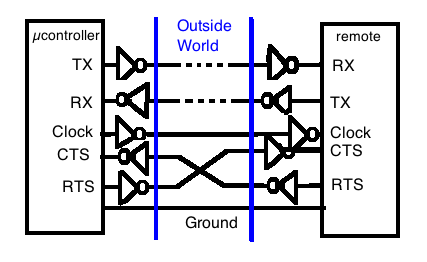
USART — это модификация UART. Расшифровывается как Universal Synchronous/Asynchronous Receiver/Transmitter. При этом добавляется дополнительных три провода: CLOCK, CLEAR TO SEND (CTS), READY TO SEND (RTS).
С помощью такой добавки устраняется необходимость иметь на обоих устройствах точные часы (с рассинхроном не более 5%), а также необходимость и приемнику, и передатчику устанавливать одну и ту же скорость передачи данных. В USART сигнал от CLOCK используется для синхронизации двух устройств. Передающая сторона выдаёт прямоугольные импульсы с частотой, соответствующей скорости передачи данных. А принимающая использует эти импульсы, чтобы правильно принять данные.
Clock-сигнал был довольно обычен несколько десятков лет назад, когда связь осуществлялась с помощью модемов. Этого сигнала, кстати, не было в 9-пиновом разъёме RS-232, которые появились на IBM PC в 1984г.
USART также поддерживает ещё два контрольных сигнала: CTS, RTS. Они используются для контроля передачи данных. Например, у получателя может заполниться буфер, в который поступали данные, тогда он выставляет RTS, сообщая, что надо приостановить передачу и подождать пока появится место в буфере.
RTS и CTS соединяются крест-накрест: RTS-CTS, CTS-RTS (показано на схеме выше). Таким образом, производится как бы «обмен рукопожатиями»: когда включен RTS получателя, выключается CTS отправителя и наоборот.
Следует использовать USART вместо UART, так как это позволяет проводить обмен рукопожатиями и синхронизировать передачу. В коде это будет означать постоянную проверку CTS значений, либо генерацию прерывания CTS-пином.
Кстати, для обратной совместимости USART может быть использован как простой UART с использованием только трёх проводников: RX, TX, Земля.
Где используются UART и USART?
Оба протокола используются в GPS модулях, flash-загрузчик в процессорах ATMEL, старой компьютерной периферии, а также в разнообразном промышленном оборудовании. В общем он все еще очень широко использхуется для обмена информацией между устройствами.
GPS модули поддерживают стандарт NMEA 0183, в котором определена поддержка модулями UART. Конечно, на подходе новый стандарт NMEA 2000, в котором будет использоваться протокол CAN, но пока ещё превалирует использование UART.
Несмотря на то, что ещё можно найти компьютеры с портами RS-232, эти порты уже не найти на ноутбуках и других малогабаритных устройствах. Для обмена информацией с промышленным оборудованием и, к примеру, процессорами ATMEL и устройствами на их основе, как например популярная ARDUINO, часто используются чипы для преобразования последовательного протокола в USB. Благодаря этому UART еще будет жив какое-то время.
Это перевод. Автор оригинальной статьи — Andrei Chichak. Кстати, у них очень интересный блог. Рекомендую.
/blog/uart-ili-posledovatelnyie-interfejsyi/ Существует множество способов общения между устройствами. Я расскажу об одном из таких способов общения между устройствами: последовательном интерфейсе или просто UART 2017-03-22 2017-03-27 uart, usb uart, ft232r uart, arduino, микроконтроллер
Большой радиолюбитель и конструктор программ
Благодаря достижениям электроники у нас есть компьютеры, планшеты, смартфоны и другая популярная техника. Я создал этот сайт для популяризации радиолюбительства. Подписывайтесь на блог, рассылку и группу в ВК: vk.com/mp16a!
- Основы электроники
- Компоненты
- Ликбез
- Пошаговое изучение
- Аналоговая схемотехника
- Цифровая схемотехника
- Книги для начинающих
- Книги для продвинутых
- Другие
- Уроки для начинающих
- Паяльные прилады
- Измерительные приборы
- Закрома Родины
- Рисовалки печатных плат
- Симуляторы схем
- Устройство и принципы работы
- Программаторы
- Алгоритмы для МК
- Распиновки
- Arduino и прочие
- Простые схемы
- Любительские истории
- Радиолюбительские технологии
- Схемы усилителей
- Схемы источников питания
- Схемы на МК
Источник: mp16.ru
Введение в UART на ESP32. Работа с UART1 на ESP32.
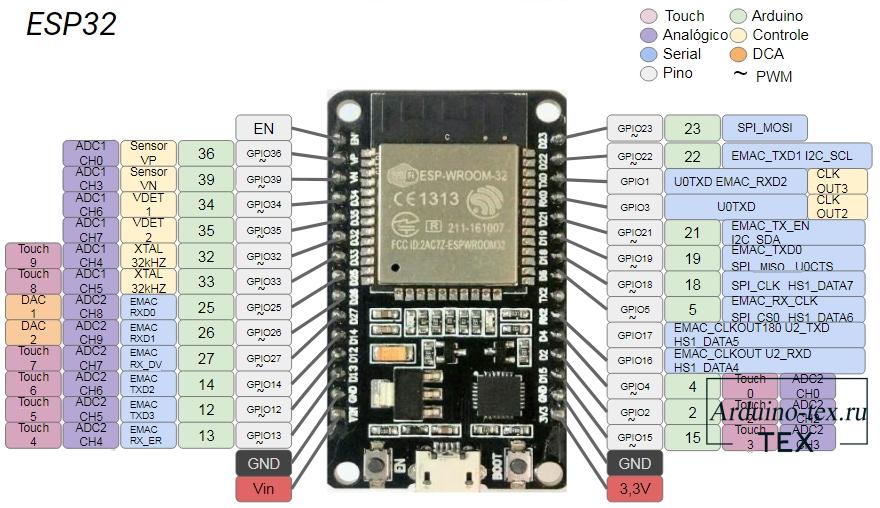
UART (Universal Asynchronous Receiver/Transmitter) — это последовательный протокол связи, который обеспечивает простой обмен данными между двумя устройствами. Микроконтроллер ESP32 предоставляет три шины UART: UART0, UART1 и UART2. Их можно использовать для общения с различными устройствами, такими как сенсоры, Arduino, Raspberry Pi и компьютеры.
Использование UART0 на ESP32.
UART0 является основным UART на ESP32 и по умолчанию подключается к пинам GPIO1 (TX0) и GPIO3 (RX0). Он часто используется для связи с компьютером через серийный монитор и также используется для прошивки платы ESP32 новыми программами. Сообщения могут выводиться в консоль с помощью Serial.println() .
Возможности UART2 на ESP32.
Чтобы использовать UART2, достаточно добавить Serial2.begin() в функцию setup() , а для отправки сообщений использовать Serial2.println() . По умолчанию UART2 подключен к пинам GPIO16 (RX2) и GPIO17 (TX2), но вы можете изменить эти пины в процессе настройки, что может быть полезно при использовании модуля Wrover. В следующем примере кода показано, как использовать UART2:
void setup() < Serial2.begin(115200); >void loop()
Обратите внимание: Сообщение, отправленное через UART2, не будет отображаться в мониторе порта, так как UART2 не подключен к USB компьютера. Вместо этого он будет передаваться через указанные пины.
Работа с UART1 на ESP32: Использование выбранных пинов для последовательного интерфейса.
UART1 по умолчанию не привязан к конкретным пинам, так как использует те же пины, что и память flash на ESP32. Однако вы можете использовать UART1, выбрав нужные пины с помощью функции «GPIO matrix» на ESP32. В следующем примере кода показано, как настроить серийный интерфейс на пинах GPIO14 и GPIO12 с использованием UART1:
void setup() < /* * UART1 ->Serial1 * RX Pin -> GPIO 14 * TX Pin -> GPIO 12 * UART Configuration -> SERIAL_8N1 */ Serial1.begin(115200, SERIAL_8N1, 14, 12); > void loop()
В приведенном коде сообщение «Hello from UART1» будет отправлено через UART1 с использованием GPIO12 в качестве пина передачи (TX) и GPIO14 в качестве пина приема (RX).
Используя шины UART на ESP32, вы можете обеспечить надежную последовательную коммуникацию с другими устройствами, обеспечивая беспроблемный обмен данными в ваших проектах.
Вывод:
В статье был представлен обзор UART-коммуникации на микроконтроллере ESP32. Особое внимание уделено использованию UART1, что является полезной информацией, которую не просто найти.
Управление UART1 на ESP32 требует некоторых дополнительных настроек, так как по умолчанию он не привязан к конкретным пинам из-за его совместного использования с памятью flash. Однако, статья приводит пример кода, в котором показано, как выбрать желаемые пины с использованием функции «GPIO matrix» и настроить UART1 для передачи и приема данных.
В целом, статья предоставляет полезные сведения о применении UART на ESP32 и особенно подчеркивает использование UART1, что делает ее ценным ресурсом для разработчиков, ищущих информацию о работе с UART на ESP32.
Источник: arduino-tex.ru
Интерфейсы микроконтроллеров (Часть 1)
Итак что же такое интерфейс?
Вездесущая Википедия дает такой ответ: Физический (аппаратный) интерфейс — способ взаимодействия физических устройств. Чаще всего речь идёт о компьютерных портах.
Т.е. если мы попытаемся связать наш микроконтроллер с другими устройствами нам потребуется знать определенный набор правил, методов и характеристик оборудования, чтобы сделать это безболезненно. Давайте рассмотрим основные типы интерфейсов, которые мы можем встретить «на борту» микроконтроллера.
Последовательный интерфейс UART/USART
Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter — UART или USART) — удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером.
Изначально использовался в компьютерах для большинства периферийных устройств, таких как плоттер, удаленный принтер, мышь, внешний модем и т. д. До настоящего времени для последовательной связи IBM PC-совместимых компьютеров используются адаптеры с интерфейсом RS-232С (новое название EIA-232D). В современном IBM PC-совместимом компьютере может использоваться до четырех последовательных портов, имеющих логические имена соответственно COM1, COM2, COM3 и COM4.
Основой последовательного адаптера является микросхема UART (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемопередатчик. Обычно используется микросхема UART 16550A.
Она имеет 16-символьный буфер на прием и на передачу и, кроме того, может использовать несколько каналов прямого доступа в память DMA -habrahabr.ru/post/37455/ . При передаче микросхема UART преобразует параллельный код в последовательный и передает его побитно в линию, обрамляя исходную последовательность битами старта, останова и контроля. При приеме данных UART преобразует последовательный код в параллельный (разумеется, опуская служебные символы). Непременным условием правильной передачи (приема) является одинаковая скорость работы приемного и передающего UART, что обеспечивается стабильной частотой кварцевого резонатора. Основным преимуществом последовательной передачи является возможность пересылки данных на большие расстояния, как правило, не менее 30 метров. В IBM PC-совместимых персональных компьютерах из 25 сигналов, предусмотренных стандартом RS-232, используются в соответствии с EIA только 9; таким образом, в данном интерфейсе как правило применяются 9-контактные разъемы типа DB-Shell.
В современных компьютерах UART и СОМ порт уже не применяются напрямую, но они получили вторую жизнь для связи с различными нестандартными внешними устройствами в числе которых вошли и устройства на микроконтроллерах. Аппаратная часть при этом стала значительно проще для связи микроконтроллеров друг с другом подключение UART осуществляется по трём линиям: RXD – приём, TXD – передача и GND – общий (минус).
Подключать UART надо, так сказать «наоборот» RXD к TXD, а TXD к RXD как на картинке ниже:
С помощью UART также можно можно связать микроконтроллер и компьютер, но есть одна проблема: у UART интерфейса логические уровни 0 и +5 вольт, а в компьютере логические уровни в интерфейсе RS-232 могут быть от -25 до -3 вольт и от +3 до +25 вольт. Для этого применяют специальный преобразователь уровней на микросхеме MAX232:
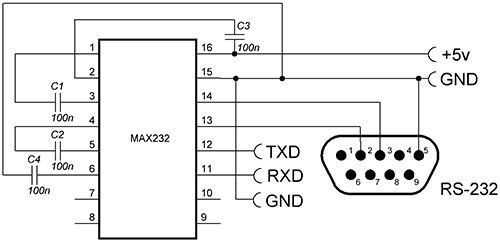
Все сигналы UART передаются специально выбранными уровнями, обеспечивающими высокую помехоустойчивость связи. Отметим, что данные передаются в инверсном коде (логической единице соответствует низкий уровень, логическому нулю — высокий уровень. Более подробно о логических уровнях смотрите тут — www.drive2.ru/b/2528993/).
Формат передаваемых данных показан на рисунке 4. Собственно данные (5, 6, 7 или 8 бит) сопровождаются стартовым битом, битом четности и одним или двумя стоповыми битами. Получив стартовый бит, приемник выбирает из линии биты данных через определенные интервалы времени. Очень важно, чтобы тактовые частоты приемника и передатчика были одинаковыми, допустимое расхождение — не более 10%). Скорость передачи по RS-232C может выбираться из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от ‘Serial Peripheral Bus’, что отражает его предназначение — шина для подключения внешних устройств. Шина SPI организована по принципу ‘ведущий-подчиненный’.
В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др.
Главным составным блоком интерфейса SPI является обычный сдвиговый регистр, сигналы синхронизации и ввода/вывода битового потока которого и образуют интерфейсные сигналы. Таким образом, протокол SPI правильнее назвать не протоколом передачи данных, а протоколом обмена данными между двумя сдвиговыми регистрами, каждый из которых одновременно выполняет и функцию приемника, и функцию передатчика. Непременным условием передачи данных по шине SPI является генерация сигнала синхронизации шины. Этот сигнал имеет право генерировать только ведущий шины и от этого сигнала полностью зависит работа подчиненного шины.
Электрическое подключение
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала.
Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 6. Здесь, ведущий шины передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных.
Представленную схему можно упростить исключением линии MISO, если используемая подчиненная ИС не предусматривает ответную передачу данных или в ней нет потребности. Одностороннюю передачу данных можно встретить у таких микросхем как ЦАП, цифровые потенциометры, программируемые усилители и драйверы.
Таким образом, рассматриваемый вариант подключения подчиненной ИС требует 3 или 4 линии связи. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна. Когда используется только одна внешняя ИС, может возникнуть соблазн исключения и линии SS за счет жесткой установки низкого уровня на входе выбора подчиненной микросхемы. Такое решение крайне нежелательно и может привести к сбоям или вообще невозможности передачи данных, т.к. вход выбора микросхемы служит для перевода ИС в её исходное состояние и иногда инициирует вывод первого бита данных.

При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение (рис. 7), либо каскадное (последовательное) (рис. 8).
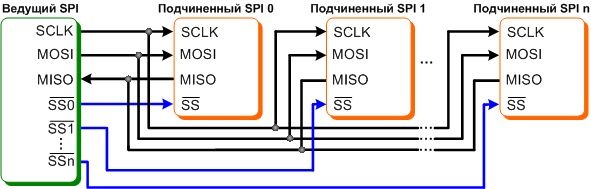
Независимое подключение более распространенное, т.к. достигается при использовании любых SPI-совместимых микросхем. Здесь, все сигналы, кроме выбора микросхем, соединены параллельно, а ведущий шины, переводом того или иного сигнала SS в низкое состояние, задает, с какой подчиненной ИС он будет обмениваться данными.
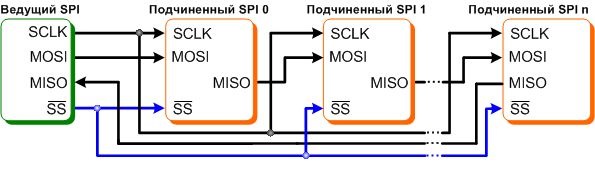
Главным недостатком такого подключения является необходимость в дополнительных линиях для адресации подчиненных микросхем (общее число линий связи равно 3+n, где n-количество подчиненных микросхем). Каскадное включение избавлено от этого недостатка, т.к. здесь из нескольких микросхем образуется один большой сдвиговый регистр. Для этого выход передачи данных одной ИС соединяется со входом приема данных другой, как показано на рисунке 8. Входы выбора микросхем здесь соединены параллельно и, таким образом, общее число линий связи сохранено равным 4. Однако использование каскадного подключения возможно только в том случае, если его поддержка указана в документации на используемые микросхемы. Чтобы выяснить это, важно знать, что такое подключение по-английски называется ‘daisy-chaining’.
Протокол передачи
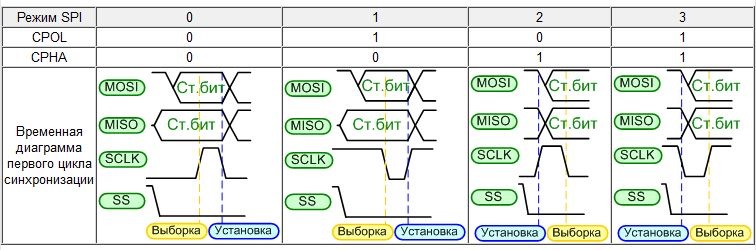
Протокол передачи по интерфейсу SPI предельно прост и, по сути, идентичен логике работы сдвигового регистра, которая заключается в выполнении операции сдвига и, соответственно, побитного ввода и вывода данных по определенным фронтам сигнала синхронизации. Установка данных при передаче и выборка при приеме всегда выполняются по противоположным фронтам синхронизации. Это необходимо для гарантирования выборки данных после надежного их установления. Если к этому учесть, что в качестве первого фронта в цикле передачи может выступать нарастающий или падающий фронт, то всего возможно четыре варианта логики работы интерфейса SPI. Эти варианты получили название режимов SPI и описываются двумя параметрами:
CPOL — исходный уровень сигнала синхронизации (если CPOL=0, то линия синхронизации до начала цикла передачи и после его окончания имеет низкий уровень (т.е. первый фронт нарастающий, а последний — падающий), иначе, если CPOL=1, — высокий (т.е. первый фронт падающий, а последний — нарастающий));
CPHA — фаза синхронизации; от этого параметра зависит, в какой последовательности выполняется установка и выборка данных (если CPHA=0, то по переднему фронту в цикле синхронизации будет выполняться выборка данных, а затем, по заднему фронту, — установка данных; если же CPHA=1, то установка данных будет выполняться по переднему фронту в цикле синхронизации, а выборка — по заднему). Информация по режимам SPI обобщена в таблице.
Ведущая и подчиненная микросхемы, работающие в различных режимах SPI, являются несовместимыми, поэтому, перед выбором подчиненных микросхем важно уточнить, какие режимы поддерживаются ведущим шины. Аппаратные модули SPI, интегрированные в микроконтроллеры, в большинстве случаев поддерживают возможность выбора любого режима SPI и, поэтому, к ним возможно подключение любых подчиненных SPI-микросхем (относится только к независимому варианту подключения). Кроме того, протокол SPI в любом из режимов легко реализуется программно.
Источник: www.drive2.ru