Суть модуляции заключается в изменении одного из параметров (амплитуды, частоты или фазы) несущего электрического сигнала в соответствии с колебаниями модулирующего сигнала, в котором содержится полезная информация. Как правило, модулирующий сигнал — низкочастотный, а несущий — высокочастотный. В результате смешения одного сигнала с другим получается суммарный сигнал, в котором зашифрован информационный сигнал.
Таким образом, модуляция — это способ передачи информационного колебания с помощью несущего колебания заданной высокой частоты (Рис.1). Классический пример — это телефонная связь, когда на ток высокой (несущей) частоты накладывается звуковой, речевой сигнал низкой частоты.
Обратная операция — извлечение информационного сигнала из модулированного — называется демодуляцией, а предназначенное для этого электронное устройство — демодулятором. Если в качестве несущего применяется гармоническое (синусоидальное) колебание, то модулировать можно один из трёх параметров: амплитуду, частоту или фазу.
Не работает ШИМ в импульсном блоке питания
В зависимости от выбора параметра различают следующие виды модуляции:
- Амплитудная (англ. AM — amplitude modulation).
- Фазовая (англ. PM — phase modulation).
- Частотная (англ. FM — frequency modulation).
- Квадратурно-амплитудная (англ. QAM — quadrature amplitude modulation).
Когда в качестве несущих колебаний используются последовательности импульсов (прямоугольных, треугольных и т.п.), то модулируемыми параметрами могут быть: частота импульсов, амплитуда импульсов, фаза импульсов, длительность импульсов или пауз, число импульсов или комбинация пауз и импульсов в кодовой посылке. Тогда возникает несколько видов импульсной модуляции:
- Амплитудно-импульсная (англ. PAM — pulse-amplitude modulation).
- Частотно-импульсная (англ. PFM — pulse-frequecy modulation).
- Широтно-импульсная (англ. PWM — pulse-width modulation).
- Фазоимпульсная (англ. PPM — pulse-phase modulation).
- Счётно-импульсная (англ. PNM — pulse-namber modulation).
- Кодоимпульсная (англ. PCM — pulse-code modulation).
Применение модуляции позволяет:
- Привести в соответствие параметры передаваемого сигнала с параметрами линии, по которой происходит передача сигнала.
- Повысить дальность передачи сигнала.
- Улучшить помехоустойчивость каналов связи.
- Создавать многоканальные системы передачи данных.
- Проектировать и производить импульсные источники питания.

Рис.1 Общая схема получения модулированного сигнала
Принцип работы
- Частота, фаза и амплитуда исходного (несущего) сигнала остаются неизменными.
- Под действием модулирующего сигнала меняется длительность (ширина) прямоугольного импульса, получаемого на выходе устройства.
- Промодулированное напряжение подается на силовой транзисторный или тиристорный ключ (коммутатор), который имеет только два состояния: либо «открыто», либо «закрыто».
- Усреднённое выходное напряжение с ключа поступает на интегрирующую нагрузку (электродвигатели, системы подсветки), работа которой при частоте следования импульсов выше определённой не будет сказываться на нормальном функционировании нагрузки. Например, глаз человека не будет замечать «мигание» светодиодов, когда напряжение на них падает до нуля.
- ШИМ позволяет варьировать среднее значение напряжения на интегрирующей нагрузки с помощью изменения скважности импульсов и управляющего ключа (транзисторного или тиристорного).
Характеристики ШИМ
Как следует из самого названия, основная идея состоит в варьировании ширины импульса сигнала или его скважности (коэффициента заполнения). Кроме этого параметра, к основным характеристикам ШИМ следует отнести:
ШИМ контроллер на модулях бытовой техники Принцип работы и проверка простыми словами
- Период следования сигнала — T.
- Частоту — f.
- Амплитуду — Uвх.
- Скважность — S или коэффициент заполнения D.
Величина амплитуды в вольтах задается потребностями нагрузки для обеспечения номинального напряжения питания.

По определению величина периода T связана с частотой формулой: T=1/f.
Период равен сумме tи и tп (см. Рис.2): T=tи+tп
По определению скважность — это отношение величины периода к длительности импульса: S=T/tи
Для инженерных расчётов чаще используется обратная величина D — коэффициент заполнения, часто указываемый в процентах (см. Рис.3): D=1/S=tи/T.

Рис.3 Коэффициент заполнения
Формирование ШИМ-сигналов
- GND (от англ. ground — земля). Общий вывод (земля, масса, точка нулевого потенциала). Вывод (ножка) подсоединяется к земле блока питания устройства.
- VC — вывод питания. Служит для подачи электропитания на микросхему.
- VCC — вывод, служащий для осуществления контроля за стабильностью питания. Контроллер «следит» за силовыми ключами, которые выполнены на биполярных или полевых транзисторах. Снижение напряжения приводит к неполному открыванию транзистора, что чревато быстрым перегревом и выходом из строя. В случае понижения напряжения ниже допустимого для данного контроллера управляющее устройство выключается. Чаще всего ножка VCC подключается к VC.
Выходное управляющее напряжение (OUT)
С OUT-вывода контроллера сформированный ШИМ-сигнал подаётся на силовой ключ. Количество ключей может быть разное, поэтому выход может быть однотактный или двухтактный (с одним ключом или двумя). Два ключа требуются в случае применения полевых транзисторов. Наряду с однотактными контроллерами (один OUT-вывод), применяются двухтактные с двумя OUT-выводами.
Область применения
Возможности ШИМ чаще всего востребованы при проектировании электронных устройств, регулирующих среднее напряжение или ток, протекающий через нагрузку. Некоторые популярные сферы применения:
- Управление режимами работы сварочных аппаратов.
- Производство автономных (например, автомобильных) инверторов — преобразователей постоянного напряжения аккумуляторов в переменное.
- Повсеместное использование в схемах зарядных устройств для аккумуляторов.
- Регуляторы частоты вращения мощных асинхронных двигателей.
- Устройства управления электрическими нагревателями, например, в востребованных сегодня системах обогрева «тёплый пол».
- Регулировка яркости подсветки жидкокристаллических и светодиодных дисплеев мобильных телефонов, смартфонов, ноутбуков, мониторов, телевизоров.
- Управление цветовыми оттенками RGB-диодов (красного, зелёного и синего). Меняя яркость свечения каждого диода, можно на выходе синтезировать огромное количество цветов.
В цифровой технике ШИМ является основным способом регулирования. Это связано с тем, что амплитуда используемого в цепи сигнала жестко зафиксирована (логический ноль — 0,0 В, логическая единица — 5,0 В или 3,3 В), поэтому изменить напряжение или ток можно только с помощью модуляции несущей по ширине импульса с последующим её усреднением. Вследствие этого ШИМ востребован для регулирования тока и напряжения в устройствах, которые способны усреднять импульсный сигнал.
Принцип работы ШИМ-контроллера
ШИМ-контроллер служит для формирования широтно-модулированного сигнала и управления силовыми ключами. Работа транзистора в ключевом режиме означает, что он может быть в двух состояниях — либо полностью открыт, либо полностью закрыт. В закрытом состоянии через запертый p-n-переход может протекать только минимальный ток утечки (порядка нескольких мкА), вследствие чего потери на нагрев минимальны. При открывании транзистора величина тока резко возрастает, но при этом теплопотери также незначительны, так как:
- Сопротивление p-n-перехода мало.
- Выходной сигнал модулированный, поэтому за время нахождения в открытой фазе, регулируя скважность поступающих импульсов, удаётся избежать тепловых потерь.
На базе этих принципов удаётся разрабатывать компактные ШИМ-преобразователи с высоким КПД.

Рис.4 Пример ШИМ-контроллера
Аналоговая ШИМ
Аналоговый ШИМ-контроллер создаёт управляющий сигнал посредством аналогового компаратора, на инвертирующий вход которого подан сигнал треугольной или пилообразной формы, а на неинвертирующий — модулирующий непрерывный сигнал. На выходе импульсы имеют прямоугольную форму. Частота следования равна частоте «пилы», а длительность положительной части импульса определяется величиной времени, когда уровень модулирующего сигнала, поданного на неинвертирующий вход компаратора, выше уровня «пилы» на инвертирующем входе. В течение времени, когда напряжение «пилы» превышает модулирующий сигнал, на выходе получится отрицательная часть импульса. При подаче «пилы» на неинвертирующий вход, а модулирующий на инвертирующий, на выходе прямоугольные импульсы станут плюсовыми, когда напряжение «пилы» будет превышать уровень модулирующего сигнала на инвертирующем входе, и отрицательным, когда величина «пилы» опустится ниже уровня модулирующего сигнала.
Цифровая ШИМ
Цифровая информация передаётся с помощью сигналов только двух уровней — «ноль» или «единица», то есть или высокий уровень напряжения (100%), или низкий (0%). Но для управления нагрузкой требуется плавная регулировка. Эту задачу решают с помощью ШИМ-контроллеров, в которых осуществляется передискретизация, когда частота переключения значительно (в несколько раз) превышает реакцию устройства (электродвигатели, светодиоды). Варьируя скважность импульсов (коэффициент заполнения), удаётся изменять среднее значение напряжения на выходе. Плавность регулировки достигается работой контроллера на частотах, превышающих десятки кГц.
Как проверить ШИМ-контроллер
- От внешнего источника подключить напряжение питания к ножкам микросхемы Vc и GND. Чтобы исключить ошибку, необходимо внимательно изучить описание микросхемы (data sheets).
- Сигнал с OUT-выхода микросхемы подать на вход осциллографа.
Если на экране осциллографа воспроизводится последовательность импульсов с параметрами, соответствующими описанию, значит, микросхема исправна. Отсутствие сигнала на OUT-выходе означает, что контроллер неисправен.
Заключение
Таким образом, можно констатировать, что на сегодняшний день ШИМ — один из самых востребованных и эффективных способов управления уровнем мощности, подаваемого на нагрузку. Регулирование мощности, подающейся на нагрузку (двигатели, световые системы, блоки зарядки) с помощью изменения скважности импульсов постоянной частоты, позволяет поднять КПД таких устройств до 80-90%. Применение современных, недорогих микроконтроллеров делает доступным проектирование и изготовление ШИМ собственными силами.
Источник: principraboty.ru
ШИМ-контроллер: схема, принцип работы, управление
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
- Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название «мягкий старт». При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Составляющие схемы блоков питания с ШИМ-контроллерами
Типовая схема состоит из генератора импульсов, в основе которого лежит ШИМ-контроллер. Широтно-импульсная модуляция дает возможность собственноручно контролировать амплитуду сигнала на выходе ФНЧ, изменяя при необходимости длительность импульса или его скважность. Сильная сторона ШИМ – высокий КПД усилителей мощности, в особенности звука, что в целом обеспечивает устройствам довольно обширную сферу применения.
ШИМ-контроллеры для блоков питания могут использоваться в схемах с различными мощностями. Для реализации относительно маломощных схем необязательно включать в их состав большое число элементов – в качестве ключа может выступать обычный полевой транзистор.
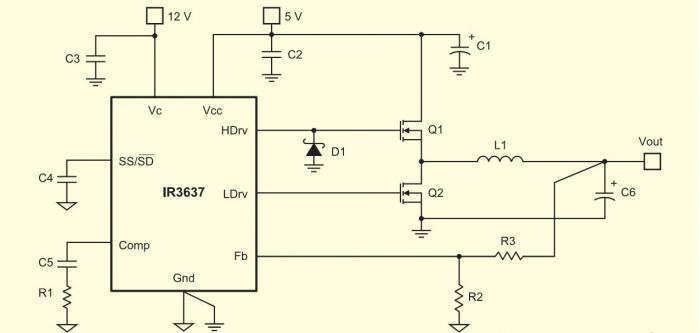
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
Источник: www.syl.ru
Контроллер ШИМ своими руками

Сегодня разберёмся что такое ШИМ и с чем его едят, а также как сделать контроллер в домашних условиях.
Что такое ШИМ?
ШИМ (широтно-импульсная модуляция, англ. pulse—width modulation (PWM)) — это способ управления мощностью путём импульсной подачи питания. Мощность меняется в зависимости от длительности подаваемых импульсов.
ШИМ в современной электронике применяется повсеместно, для регулировки яркости подсветки вашего смартфона, скорости вращения кулера в компьютере, для управления моторами квадрокоптера или гироскутера. Cписок можно продолжать бесконечно.
В любительской электронике ШИМ контроллеры часто используются для управления яркостью светодиодных лент и для управления мощными двигателями постоянного тока.
Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:
![]()
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
Самый простой вариант это микросхема NE555, собирается всё по схеме:

Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.

Стоит $0,5, работает стабильно при питании от 5 до 16 вольт. Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки.
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup ( ) <
pinMode ( 3 , OUTPUT ) ; // опреднляем пин D3 как выход
int duty = 30 ; // определяем скважность равной 30%
int value = 255 / 10 * duty ; // переводим значение скважности в 8 битный формат
analogWrite ( 3 , value ) ; // выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:

Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %.
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью.
Как подключить к нагрузке
Напрямую генератор ШИМ сигнала к нагрузке подключать не следует, потому как он слаботочный и скорее все сразу же сгорит. Для того, чтобы управлять нагрузкой необходим ключ на мосфет-транзисторе. Берём N-канальный мосфет-транзистор IRF3205 и собираем всё по схеме:

Резистор R1 нужен для защиты пина ардуинки от выгорания, а резистор R2 для того, чтобы транзистор полностью закрывался, когда ардуина не даёт выходного сигнала.
Как видно ничего сложного. Четыре элемента и ШИМ-контроллер готов. Он уже может управлять одноцветной светодиодной лентой или каким-нибудь моторчиком.
Если нужна трехцветная лента или больше лент (делаем многоканальный ШИМ), просто добавляем ключи на пины D3, D5, D6, D9, D10, D11 (только на них работает ШИМ). Итого, Ардуина способна управлять мощностью 6-ти устройств одновременно.
IRF3205 способен выдерживать токи до 70 Ампер при напряжении до 55 Вольт, таких характеристик вполне достаточно для решения большинства бытовых задач.
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы.

Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.
Если нужно управлять, к примеру,12 -ти вольтовым устройством, то схема немного усложнится. Добавится так называемое «плечо раскачки» или драйвер полевого транзистора. По классике он собирается на двух, а иногда и на трёх транзисторах, но мы есть вариант немного проще, который работает при невысоких частотах:

Контроллер ШИМ для RGB светодиодной ленты
В качестве примера приведу схему ШИМ контроллера для RGB светодиодной ленты на ардуино. В ней используется трёхканальный ШИМ для управления тремя цветами ленты. Ниже будет ссылка на готовое устройство, собранное на этой схеме управления.

Соединяется всё вот так:

В схеме я добавил ещё кнопку, она нам поможет в будущем переключать цвета и регулировать яркость.
Вот простой код, позволяющий засветить ленту различными цветами. Чтобы изменить цвет подставьте цифры в значения для R, G и B из комментария ниже.
Источник: electricdoma.ru