Благодаря предыдущей статье, у нас теперь есть базовые представления об интерфейсе UART. Руководствуясь ими и даташитом на контроллер STM32F100RBT6B попробуем разобраться, как что-то передать через UART в компьютер и наоборот, заставить контроллер принять что-то от компьютера.
Начать нужно с того, что UART интерфейс в контроллерах STM32 не один, в вышеупомянутом контроллере их аж три штуки. Я планирую использовать UART1, следовательно передающий провод (TxD) от USB-UART преобразователя я подсоединяю к ноге контроллера работающей на приём (PA10), а передающую ногу (PA9) я подключаю ко входу (RxD) преобразователя USB-UART.
Для работы с этим интерфейсом существует великое множество регистров. Для облегчения работы программиста, вместе с CooCox’ом поставляется библиотека предназначенная для работы с UART’ом. Я довольно хорошо изучил её и она мне понравилась, но для лучшего понимания принципов её работы нужно вкратце познакомится с регистрами. В следующей статье, в которой будет описан практический пример использования UART’a, я буду использовать именно её. Для начала стоит сказать что нужно настроить чтоб интерфейс заработал:
Цифровые интерфейсы: 02. UART (Последовательный интерфейс)
- Включить тактирование порта А
- Настроить ногу PA9 как выход push-pull в альтернативном режиме. Частота 50 МГц
- Настроить ногу PA10 как вход без подтяжки
- Включить тактирование UART1
- Настроить параметры UART1: Скорость, кол-во стоп бит, проверку четности итд.
С первыми четырьмя пунктами проблем быть не должно, всё это знакомо из статьи про портымикроконтроллера, а вот с пятым пунктом немного сложнее, но попробуем разобраться.
Начнем с регистра USART_BRR при помощи которого задаётся скорость приёма/передачи:
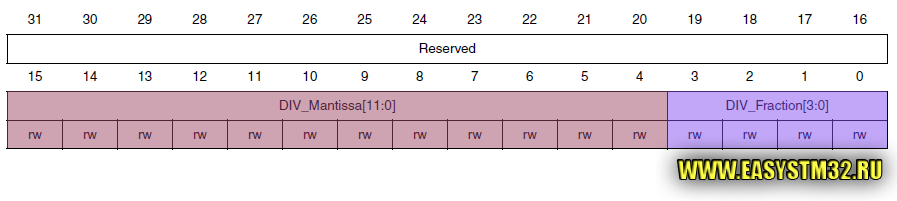
Регистр делится на две части: Целая (DIV_Mantissa) и дробная (DIV_Fraction). Для получения значения которое нужно записать в этот регистр, нужно воспользоваться формулой:
USART_BRR = (fck + baudrate /2 ) / baudrate
где fck это частота тактирования UART1, а baudrate это желаемая скорость передачи/приёма. Со скоростью всё понятно, а как определить fck ? Забегая вперед, скажу, что это отдельная тема для большой статьи (которая будет). Эта частота будет равна 24 Мгц если использовать кварц на 8 МГц и ничего не менять в настройках тактирования, а оставить их по умолчанию.
Приведу пример рассчётов: Я хочу настроить уарт на скорость 9600. Путем нехитрых рассчётов получаем (24000000 + 9600 / 2)/ 9600 = 2500.5 потом отсекаем дробную часть, переводим число в шестнадцатеричную систему счисления и получаем 0x9c4. Еще есть другая формула, руководствуясь которой можно вычислить значение регистра USART_BRR. В биты DIV_Mantissaследует записать целое число(без округления) полученное в результате выполнения арифметической операции:
fck / (16*baudrate)
Дробную часть нужно округлить до сотых и умножить на 16. Потом еще раз округлить но уже до целого. После этого записать её в биты DIV_Fraction. Попробуем рассчитать регистр USART_BRR но уже с использованием этого способа. 24000000 / (16 * 9600) = 156,25.
Принцип работы UART
Целая часть 156 — пойдет в DIV_Mantissa без изменений, а дробную часть 0.25 умножаем на 16 и получаем 4. Округлять тут нам не пришлось, поэтому в DIV_Fraction записываем 4. Переведем 156 и 4 в шестнадцатиричную систему счисления и получим 0x9c и 0x04 а вместе они образуют 0x9c4. В итоге мы получили тот же самый результат. Но лично мне первый способ больше по душе Следующий регистр USART_CR1:
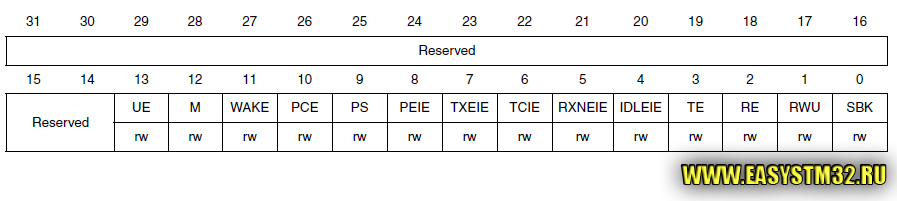
UE — Бит предназначен для включения UART’a. То есть просто подать тактирование мало, чтоб уарт заработал надо установить этот бит в единицу.
M — задает количество бит даннных которое будет передаваться за раз. Если бит равен 0, тогда уарт будет отправлять/принимать по 8 бит, если единице то 9 бит. Почему бит называется М для меня так и осталдось загадкой.
PCE — Если бит равен 1 то контроль чётности включен, в противном случае выключен.
PS — тип контроля чётности: 0 — чёт, 1 — нечет.
TE — Если бит равен 1 то разрешена работа передатчика (нога TxD)
RE — Если бит равен 1 то разрешена работа приёмника (нога RxD)
Как видно по двум последним битам в этой таблице — передатчик и приёмник друг от друга не зависят. Если не требуется принимать(или передавать) данные, то можно сэкономить одну ножку контроллера (TxD или RxD) просто не включая не нужную нам часть UART’a.
Следующий регистр настроек это USART_CR2
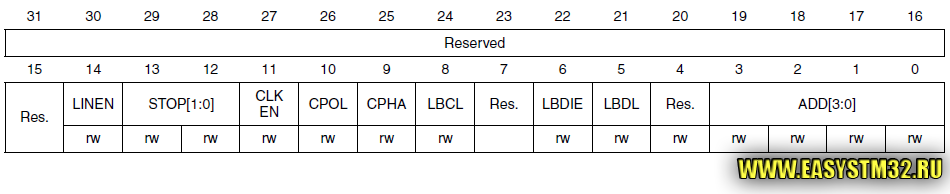
В нем нас интересуют только два бита: STOP1, STOP0
При помощи этих двух бит можно задать количество стоповых бит в посылке.
| STOP1 | STOP0 | Количество стоповых бит |
| 0 | 0 | 1 стоп бит |
| 0 | 1 | 0.5 стоп бита |
| 1 | 0 | 2 стоп бита |
| 1 | 1 | 1.5 стоп бита |
Конечно я описал далеко не все биты, но все нам и не понадобятся, во всяком случае пока. Чтобы произвести минимальную настройку будет достаточно знать то что я написал выше. После того как всё настройки уарта произведены можно попробовать что-то отправить/получить через UART. Для приёма/передачи служит регистр USART_DR:
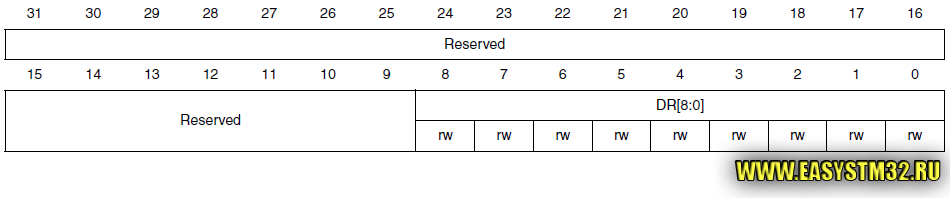
В нем используются первые 8 или 9 бит (в зависимости от бита M в регистре USART_CR1). Чтоб отправить в UART данные просто записываем их в этот регистр. Чтоб прочитать данные просто читаем этот регистр. С этим ни каких сложностей, но не понятно когда мы можем читать и передавать данные.
Ведь отправлять данные очень быстро нельзя, так как уарт может быть настроен на очень маленькую скорость передачи. И пытаясь начать новую передачу данных в то время как предыдущая передача не завершена не имеет особого смысла. С приёмом данных похожая ситуация. Бессмысленно читать регистр данных (USART_DR) если в него ничего не пришло. Для отслеживания состояния в котором находится UART, служит регистр USART_SR.
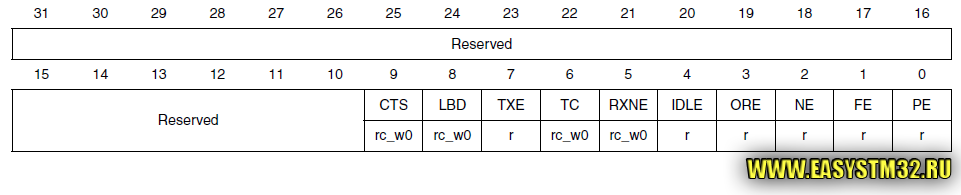
RXNE — Этот бит устанавливается когда в UART что-то пришло. Если не забрать из USART_DR, данные то они перезатрутся новыми если таковые будут.
TC — Если этот бит установлен в единицу, то это означает что передача данных завершена и можно опять что-то записывать в регистр данных (USART_DR). Остальные биты нам пока не потребуются. Ну все, довольно табличек и теории. Попробуем передать в комп строку с приветствием и смайликом.
#include «stm32f10x.h» #include «stm32f10x_gpio.h» #include «stm32f10x_rcc.h» //Функция предназначена для формирования небольшой задержки void Delay(void) < volatile uint32_t i; for (i=0; i != 0x70000; i++); >//Функция отправляющая байт в UART void send_to_uart(uint8_t data) < while(!(USART1->SR //Ждем пока бит TC в регистре SR станет 1 USART1->DR=data; //Отсылаем байт через UART > int main(void) < GPIO_InitTypeDef PORTA_init_struct; // Включаем тактирование порта А и USART1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE); // Настраиваем ногу TxD (PA9) как выход push-pull c альтернативной функцией PORTA_init_struct.GPIO_Pin = GPIO_Pin_9; PORTA_init_struct.GPIO_Speed = GPIO_Speed_50MHz; PORTA_init_struct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, //Настраиваем UART USART1->BRR=0x9c4; //BaudRate 9600 USART1->CR1 |= USART_CR1_UE; //Разрешаем работу USART1 USART1->CR1 |= USART_CR1_TE; //Включаем передатчик //Все остальные параметры (стоп биты, чётность,кол-во байт данных) уже настроены //как надо, (во все эти биты по умолчанию записаны нули), таким образом мы имеем // скорость 9600 1 стоп бит, 8 бит данных, без проверки чётности while(1) < //Выдаем в UART слово Hello send_to_uart(‘H’); send_to_uart(‘e’); send_to_uart(‘l’); send_to_uart(‘l’); send_to_uart(‘o’); send_to_uart(‘ ‘); send_to_uart(‘:’); send_to_uart(‘)’); send_to_uart(‘n’); Delay(); //небольшая задержка >>
Создаем пустой проект в CooCox’е, копируем код, компилируем и прошиваем. Я тестировал этот код на платке STM32VL Discovery с кварцем 8 МГц. На ногу PA9 я подключил вход (RxD) моего USB-UART преобразователя, настроил терминальную программу на скорость 9600 бит/сек, 1 стоп бит, без проверки чётности. В результате получил следующую картинку:
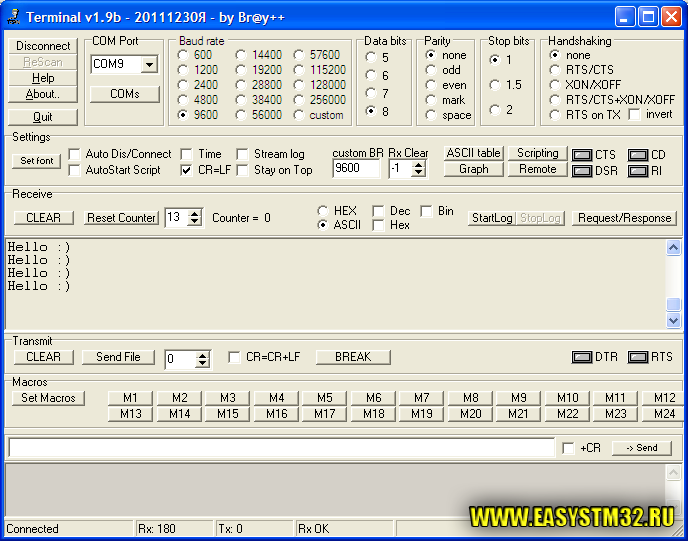
В следующей статье мы попробуем сделать с использованием UART’a нечто более полезное с практической точки зрения.
Источник: easystm32.ru
UART-интерфейс: краткое описание, использование


Помните, когда у принтеров, мышей и модемов были толстые кабели с этими огромными неуклюжими разъемами? Те, которые буквально должны были ввинчиваться в компьютер? Мало кто знает, что эти UART-компоненты использовались для связи с вашим компьютером. Почти полностью заменила эти старые кабели и разъемы технология USB.
UART-интерфейсы, описание которых найдете в этой статье, не ушли в прошлое. Их используют во многих проектах электроники DIY для подключения GPS, Bluetooth и модулей считывания карт RFID к Pi, Arduino или другим микроконтроллерам.
UART-интерфейс: описание

UART означает универсальный асинхронный приемник/передатчик. Это не коммуникационный протокол, такой как SPI и I2C, а физическая схема в микроконтроллере. Основной целью является передача и получение информации. Одно из лучших достижений технологии заключается в том, что он использует только два провода.
Сейчас мы разберемся с THX. Что это, какова история данного сертификата? Узнаем обо всех.
UART-интерфейс — это два устройства, которые обмениваются данными друг с другом. Передающий источник преобразует информацию с управляющего устройства, такого как центральный процессор, в последовательную форму, передает его в последовательном порядке на принимающий UART, который преобразует значения для принимающего устройства. Для передачи информации между двумя устройствами требуется только два провода.
Введение в коммуникацию UART
UART RS485 передае т данные асинхронно, что означает отсутствие сигнала для синхронизации выхода битов от передающего устройства к принимающему. Вместо тактового сигнала передающий UART добавляет биты начала и окончания передаваемого пакета. Эти параметры определяют начало и конец документа.
RS-485 (интерфейс-преобразователь) необходим для передачи данных и способен работать сразу с.

Когда принимающий UART обнаруживает стартовый бит, он начинает считывать входящие биты с определенной частотой, известной как скорость передачи. Скорость передачи данных является мерой скорости, выраженной в единице измерения, — бит/с. Оба устройства должны работать примерно с одинаковой скоростью передачи. Скорость передачи между передающим и принимающим устройствами может отличаться на 10%.
Оба прибора также должны быть сконфигурированы для передачи и получения той же структуры пакета.
UART — что это и как это работает?

UART, который собирается передавать информацию, получает ее из шины данных. Она используется для отправки информации другим устройством, таким как процессор, память или микроконтроллер. После того как передающий UART получает параллельные данные из шины данных, он добавляет бит начала, четности и стоп-бит, создавая пакет данных. Затем пакет выводится последовательно, по частям.
Принимающий UART считывает бит данных на свой вывод. Получающий UART преобразует информацию обратно в параллельную форму, удаляет бит начала и стоповые биты. Наконец, принимающий UART передает пакет данных параллельно шине данных на принимающей стороне.
Линия передачи обычно удерживается на высоком уровне напряжения, когда она не передает информацию. Для запуска передачи данных передающий UART тянет линию передачи от высокого к низкому за один такт. Когда принимающий UART обнаруживает переход от высокого к низкому напряжению, он начинает считывать биты в кадре данных с частотой передачи в бодах.
Описание работы и назначения параметра TTL. Способы его изменения в различных операционных системах.
Технические особенности
Базовая система UART обеспечивает надежную, умеренную скорость, полнодуплексную связь с тремя сигналами: Tx (переданные последовательные данные), Rx (полученные последовательные данные) и земля. В отличие от других протоколов, таких как SPI и I2C, никакого тактового сигнала не требуется, поскольку пользователь предоставляет аппаратному обеспечению UART необходимую информацию о времени.

Типичный сигнал данных в описании UART-интерфейса — это просто напряжение, которое переходит между логическим низким и логическим высоким значением. Приемник может корректно преобразовывать эти логические состояния в цифровые данные только в том случае, если он знает, когда пробовать сигнал. Это можно легко выполнить с использованием отдельного тактового сигнала. Например, передатчик обновляет сигнал данных на каждом фронте фронта, а затем приемник производит выборку данных на каждом заднем фронте.
Ключевые термины
Начальный бит — первый бит однобайтовой передачи. Это указывает на то, что линия данных выходит из состояния бездействия. Состояние бездействия обычно имеет логическую высоту, поэтому стартовый бит является логически низким.
Начальный бит — бит служебной информации. Это означает, что он облегчает связь между приемником и передатчиком, но не передает значимые данные.
Стоповый бит — последний бит однобайтовой передачи. Его логический уровень такой же, как состояние простоя сигнала, то есть логический максимум.
Пошаговая процедура

Чтобы сигнализировать о завершении пакета данных, отправляющий UART подключает линию передачи данных от низкого напряжения к высокому напряжению в течение двух бит продолжительности.
Описание интерфейса UART:
- Передающий UART принимает данные параллельно от шины данных и добавляет начальный бит, бит четности и стоп-бит(-ы) в кадр данных.
- Весь пакет отправляется последовательно от передающего к принимающему UART, который производит выборку линии данных с заранее сконфигурированной скоростью передачи данных.
- Принимающий UART отбрасывает начальный бит, бит четности и стоповый бит из кадра данных, преобразует последовательные данные обратно в параллель, передает их на шину данных на принимающей стороне.
- Преобразует полученные байты с компьютера по параллельным схемам в один последовательный бит-поток для исходящей передачи.
- При входящей передаче преобразует поток последовательного бита в байты, которые обрабатывает компьютер.
- Добавляет бит четности (если он был выбран) исходящих передач, проверяет четность входящих байтов (если выбрано), отбрасывает бит четности.
- Добавляет разделители начала и окончания исходящих, удаляет их из входящих передач.
Преимущества и недостатки
Протокол связи не является совершенным, но UART довольно хороши в том, что они делают. Вот некоторые плюсы и минусы, которые помогут решить, соответствуют ли они потребностям вашего проекта:
- Используется только два провода.
- Нет сигнала синхронизации.
- Имеет бит четности для проверки ошибок.
- Структура пакета данных может быть изменена, если для нее настроены обе стороны.
- Хорошо документированный и широко используемый метод.
- Размер кадра данных ограничен максимумом в 9 бит.
- Не поддерживает нескольких подчиненных или нескольких мастер-систем.
Кроме того, скорость передачи данных каждого UART-интерфейса Arduino должна находиться в пределах 10% друг от друга.
Источник: autogear.ru
Uart что это такое в телевизоре

Спонсор хостинга сайта: